



描述
導讀
隨著智能材料,智能制造技術的發展,人機交互需求的增加,“軟體機器人”得到了一大批科學家的青睞。近日,南丹麥大學(Southern Denmark University,SDU)的軟體機器人實驗室在油管(YouTube)發布了一則視頻,展示了該實驗室研究者的一些代表作品。其中包含了非常經典“剪紙”軟體機器人的相關研究,今天小編就為大家羅列出該實驗室的一些“明星”軟體機器人!Ahmad Rafsanjani教授是該實驗室的主要負責人之一,他先前于蘇黎世聯邦理工學院(ETH Zürich)獲得博士學位,之后又在ETHZ和哈佛大學從事博士后的研究。
圖1. 南丹麥大學的軟體機器人介紹一覽
▍南丹麥大學軟體機器人研究中心
南丹麥大學(University of Southern Denmark, SDU,1966年)在通訊,信息技術,工程學和生命科學領域在世界上享有極高的聲譽。SDU的軟體機器人研究中心(Center for Soft Robotics)的科學家們有代表性的軟體機器人研究在宣傳視頻中展出(文末附有完整的宣傳視頻)。該中心目前的研究方向主要在探索新型結構和材料在軟體機器人中的應用。
南丹麥大學軟體機器人實驗室網址:
https://www.sdu.dk/en/forskning/sdu_biorobotics/research+areas/soft+robotics
▍受到蛇運動啟發的剪紙軟體機器人
蛇依靠腹足有規律的波動前進,研究人員受到啟發,結合“剪紙藝術(Kirigami)”的原理設計了一種蛇形軟體機器人。該研究2018年發表于國際頂級機器人期刊《sciencerobotics (科學-機器人學)》上,SDU軟體機器人中心的Ahmad Rafsanjani副教授為第一作者。這款蛇形機器人無需依賴任何剛性元件,它的鱗片采用剪紙藝術制成。

圖2. 蛇靠腹足有規律的波動前進
圖3. 剪紙啟發的蛇形軟體機器人
剪紙藝術不同于折紙藝術,剪紙形變依靠的是剪切,而不是折疊。當機器人伸展時,扁平的二維剪紙表面會轉化為三維織紋表面,像蛇鱗一樣抓住地面。
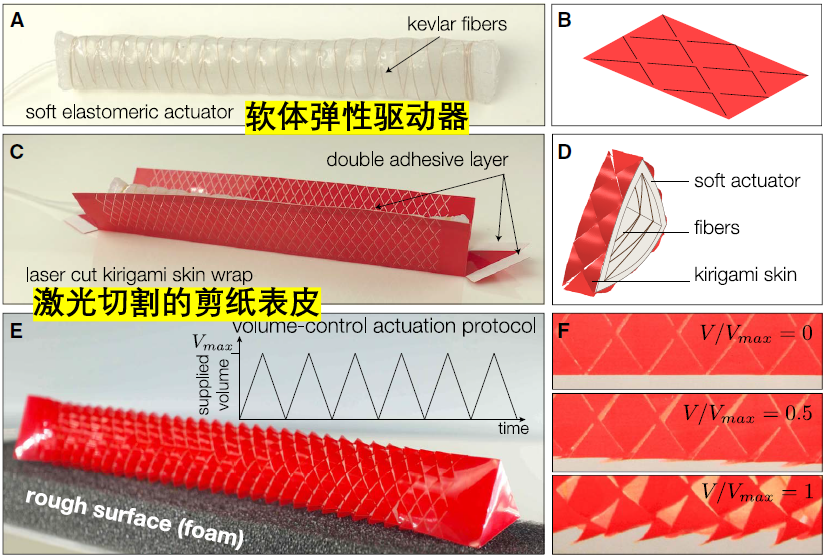
圖4. 剪紙機器人的設計和加工
研究人員從一張平面塑料紙開始,使用雷射切割機切割一組厘米級的切痕。他們將切好的塑料紙包覆住如同管子一樣的彈性體致動器,而這種致動器充氣后會膨脹伸長。當致動器充氣時,剪紙切口突出,形成一個粗糙表面,抓住地面。當致動器泄氣時,切痕折疊成平面,推進機器人前進。
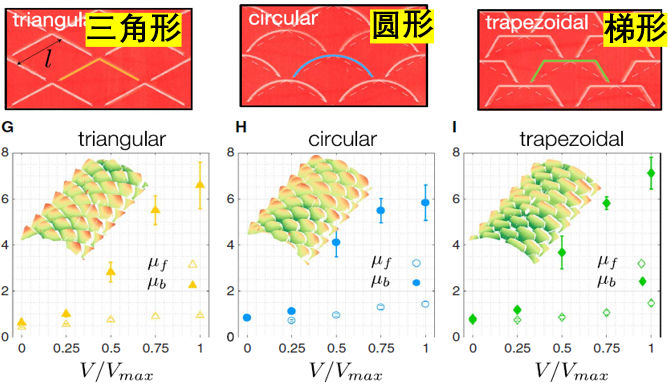
圖5. 三種不同形狀的仿生剪紙結構設計
團隊實驗了各種形狀的切痕,包括:三角形、圓形、梯形。他們發現梯形切痕,最接近蛇鱗的形狀,使得機器人的移動幅度達到最大。

圖6. 三種不同剪紙結構的機器人運動對比
相關論文信息
Rafsanjani, A., Zhang, Y., Liu, B., Rubinstein,S. M., & Bertoldi, K. (2018). Kirigami skins make a simple soft actuatorcrawl. Science Robotics, 3(15).
https://robotics.sciencemag.org/content/3/15/eaar7555
▍剪紙超材料軟體機器人
剪紙藝術為軟體機器人帶來了更多的可能性。如果將一種可拉伸的剪紙結構包覆在彈性氣囊表面,當該氣囊充氣膨脹時,受到剪紙結構的約束,氣囊就會按照設計的形狀發生形變。這項技術在機器人,醫療等領域都有著廣泛的應用前景。該研究于2020年在國際頂級材料學期刊《先進材料(Advanced Materials)》,Ahmad Rafsanjani為論文作者之一。
圖7. 剪紙結構啟發的軟體驅動器
具體而言,一個剪紙啟發的軟驅動器中包含按規律切割的剪紙薄片和氣囊。氣囊膨脹時,剪紙切口引導其生長,使一些區域膨脹,另一些區域收縮。由此,我們就能在全局范圍內控制宏觀形狀,以及在局部范圍內構建微觀特征(這也就是超材料的特征)。
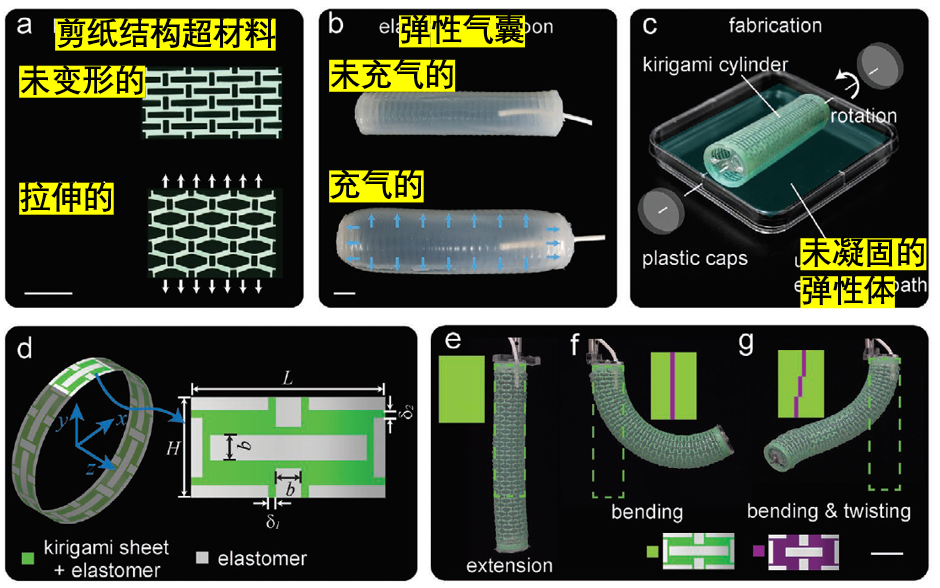
圖8. 剪紙結構驅動器的設計加工
研究人員發現,通過調整切口的幾何參數就能夠控制和嵌入復雜形狀。研究者開發了一種逆向設計算法,能使剪紙充氣裝置在最佳模式下充氣模擬目標形狀。這項成果為多尺度結構的設計奠定了基礎。
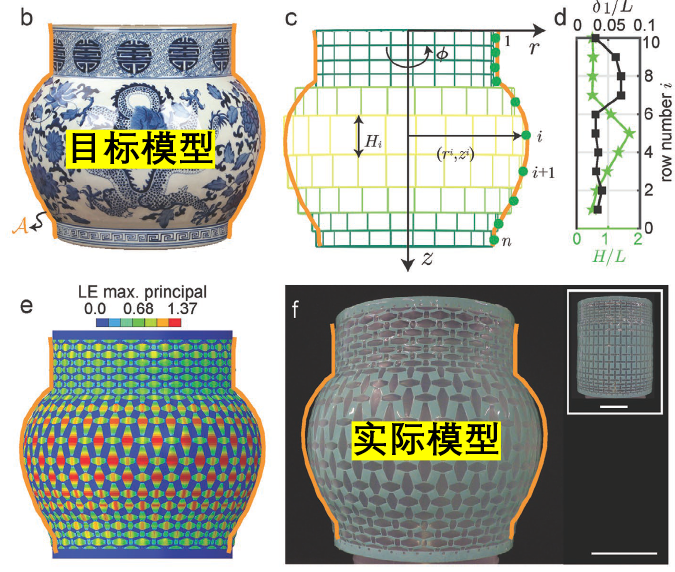
圖9. 通過優化算法設計的瓷器結構
研究人員用可編程氣球制作出了掛鉤和陶瓷花瓶。基本上只要改變兩個參數,就能用剪紙氣球編程出各種奇特的形狀。
圖10.瓷器結構變形展示
圖11.掛鉤結構變形展示
相關論文信息:
Jin, L., Forte, A. E., Deng, B., Rafsanjani,A., & Bertoldi, K. (2020). Kirigami‐Inspired Inflatables with Programmable Shapes. AdvancedMaterials, 32(33), 2001863.
https://doi.org/10.1002/adma.202001863
▍SDU軟體機器人中心的其他軟體機器人簡介
宣傳視頻中還有一些其他的軟體機器人展示,在這里簡單羅列出來,感興趣的朋友可以去查看相關論文,另外文末也附有完整的宣傳視頻。
Jonas J?rgensen助理教授研發的一款仿生機器人啟發自線翎電鰻。線翎電鰻是一種熱帶淡水魚,因為沒有背鰭,它借著擺動身體下側的旗狀魚鰭移動,能夠使它自在的向前、向后及垂直移動,泳姿優美且獨特。
圖12. 線翎電鰻
圖13.線翎電鰻啟發的軟體機器人
機器人的魚鰭和身體由硅膠和六個伺服電機驅動的骨架組成。通過控制魚鰭周期性的擺動,可以控制這款魚形機器人的游泳方向和速度。
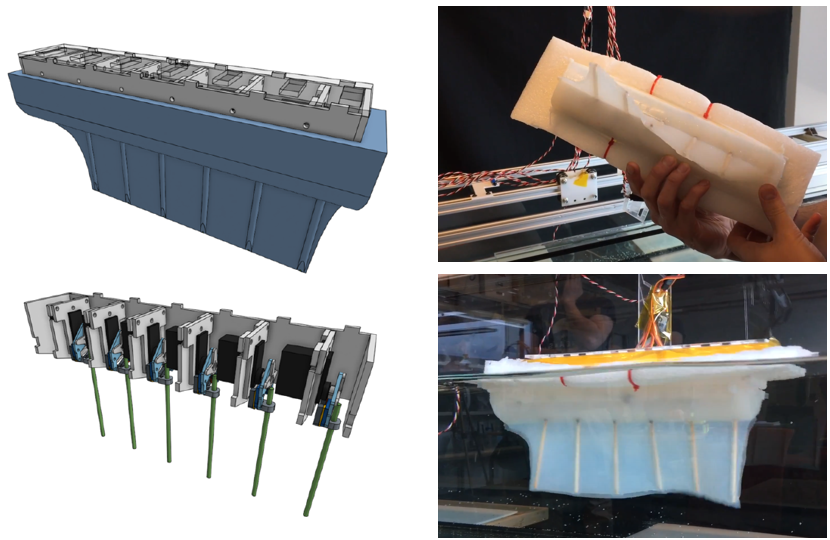
圖14.線翎電鰻機器人的結構設計
文章信息:Veenstra, F.,J?rgensen, J., & Risi, S. (2018, July). Evolution of fin undulation on aphysical knifefish-inspired soft robot. In Proceedings of the Geneticand Evolutionary Computation Conference (pp. 157-164). https://dl.acm.org/doi/10.1145/3205455.3205583
Ahmad Rafsanjani副教授參與研發的軟體超材料結構,遇到外界刺激可以迅速做出特定模式的響應。發表于國際著名期刊《PNAS》上。
圖15.軟體超材料變形示意圖
文章信息:Jin, L.,Khajehtourian, R., Mueller, J., Rafsanjani, A., Tournat, V., Bertoldi, K.,& Kochmann, D. M. (2020). Guided transition waves in multistable mechanicalmetamaterials. Proceedings of the National Academy of Sciences, 117(5),2319-2325.
https://www.pnas.org/content/117/5/2319.short
Jonas J?rgensen研發的一款用于驗證軟體機器人在人機交互中潛在應用價值的觸手,這款軟體觸手在接近或者觸碰到人體或其他障礙物的時候會做出響應,以此來實現和環境的交互。
圖16.軟體機器人——人機交互
文章信息:J?rgensen, J.(2018, March). Perceptions of a Soft Robotic Tentacle in Interaction. In Companionof the 2018 ACM/IEEE International Conference on Human-Robot Interaction (pp.377-377). https://dl.acm.org/doi/abs/10.1145/3173386.3177532
Jonas J?rgensen也將軟體機器人應用到其他和人交互的場景,例如藝術展示中。他設計了一款軟體機器人,啟發自神話故事中的角色,搭配聲音進行展示。
圖17.軟體機器人——藝術
論文信息:J?rgensen, J.(2017, June). Leveraging morphological computation for expressive movementgeneration in a soft robotic artwork. In Proceedings of the 4thInternational Conference on Movement Computing (pp. 1-4).
https://dl.acm.org/doi/abs/10.1145/3077981.3078029
▍結語
大多數機器人由高精確度和高重復性的硬機構組成。在生物體中卻融合了各種剛度的材料,以使他們能夠適應各種不同的環境。SDU軟體機器人的研究,旨在為當代機器人技術提出許多有趣的新問題和挑戰,尤其是在設計,控制,傳感和交互領域。他們致力于在軟化機器人,仿生建模,人機交互和機器人藝術方面的各種專業知識的基礎上,為軟機器人提供一種系統的研究方法。
具體來說,他們希望闡明軟機器人的適當設計標準是什么;如何針對給定任務(包括與人的協作)設計和部署適應性強的軟體;如何將電子和計算技術集成到軟機器人解決方案中;以及如何在具有特定自然約束的不同環境中利用局部和遠端傳感進行探索。
責任編輯:lq